Overview
Our research focuses on Mapping, Localization, Guidance, Navigation and Control for developing autonomous ground and aerial vehicles. Our projects span from algorithmic design and implementation to field experimentation of aerial and ground robots. A specific goal is field deployment of such vehicles in relevant environments. We are currently deploying autonomous shuttles on campus, self-driving cars, trucks and Unmanned Aerial Vehicles (UAVs). Click for more about our current and past Projects.






Current Research Themes
- GPS-denied Mapping, Estimation and Navigation: To develop robust algorithms for estimating the state (position, attitude and velocity) of Unmanned Aerial and Ground Vehicles (UxVs) in GPS denied environments using a combination of Vision, LIDAR and Inertial Sensors.
- Perception and Planning Algorithms for Shuttles: To develop and deploy Autonomous Shuttles on Campus with the goal of developing autonomous vehicles for para-transit applications
- Perception and Planning for Autonomous Trucks: Develop control, perception and planning algorithms for autonomous trucks.
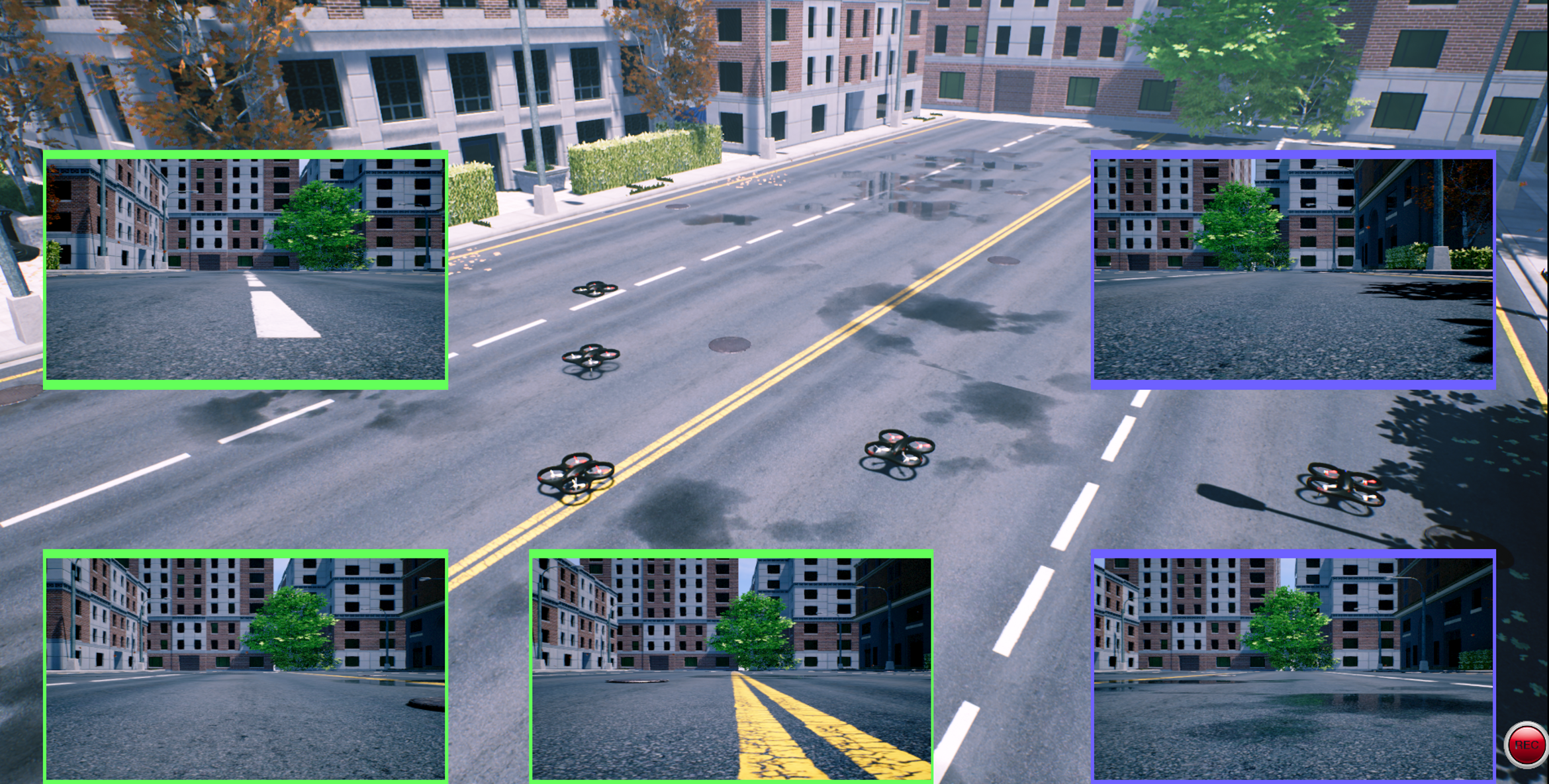
- Collaborative Localization and Planning: This project deals with developing algorithms for collaborative localization of UAVs as a group in GPS denied environments, as well as for collaborative ‘localization-aware’ planning under uncertainty.
- Obstacle Avoidance, Mapping and Navigation: The focus is on developing algorithms for obstacle avoidance based on computer vision for ground, fixed wing and rotary aerial vehicles
- Autonomous Landing on Moving Targets: This work deals with the design and implementation of a real-time, vision-based landing algorithm for an autonomous helicopter. The landing algorithm is integrated with algorithms for visual acquisition of the target (a helipad), and navigation to the target, from an arbitrary initial position and orientation. We plan to use vision for precise target detection and recognition, and a combination of vision and GPS for navigation