
This project seeks to create a lightweight sign detection module for autonomous vehicles using a LIDAR sensor. Common methods for sign detection are vision based, however, if visibility conditions are low, then another detection method must be used. Since most autonomous vehicles already require a LIDAR sensor for obstacle detection, data that is already available can be used without the expense for an additional sensor.
LIDAR sensors typically output a point-cloud of XYZ points with intensity values. Intensity values correlate to the strength of the returned laser pulse, which depend on the reflectivity of the object and the wavelength used by the LIDAR [1]. Since signs are required to have a reflective material for night time driving, we can use this property to our advantage when discriminating point clouds for signs.
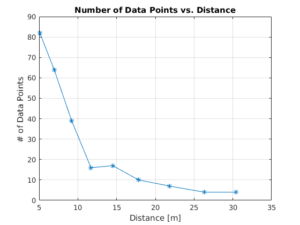
Currently, we are using a Velodyne Puck (VLP-16) mounted on top an autonomous shuttle for data acquisition. The Velody ne has 16 rings of lasers that provides 360 degrees of point cloud data at up to 100 meters away. Although the VLP-16 offers a large range, we realistically have a limit of around 25 meters for detecting a sign. This limit is imposed because the further the LIDAR is out, the further the separation between the rings is. For example, if the separation distance of the rings is greater than 2 meters, then there is a strong possibility that the laser beams will completely miss a 0.75 meter diameter stop sign.
ne has 16 rings of lasers that provides 360 degrees of point cloud data at up to 100 meters away. Although the VLP-16 offers a large range, we realistically have a limit of around 25 meters for detecting a sign. This limit is imposed because the further the LIDAR is out, the further the separation between the rings is. For example, if the separation distance of the rings is greater than 2 meters, then there is a strong possibility that the laser beams will completely miss a 0.75 meter diameter stop sign.
Initially, we are post-processing data in MATLAB to test different identification algorithms. The Velodyne spits out 30,000 points every tenth of a second, so for an efficient and robust detection algorithm must developed before it can be implemented in real time.
Factors such as distance, and angle of incidence must also be taken into consideration. For most signs, the intensity value drops as distance is increased. We are working with Texas Transportation Institute (TTI) to see how different material coatings for signs affect intensity data from the LIDAR; and if there is an optimal material to be used on street signs for consideration of autonomous vehicles.
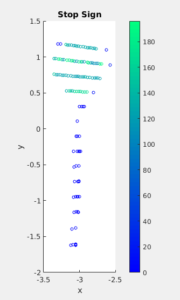
Post Processed PCD Data
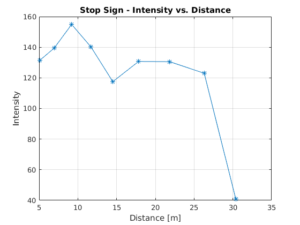
Stop Sign
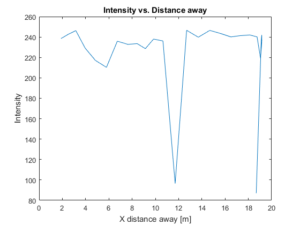
High Intensity Prismatic White Sign – Vertical
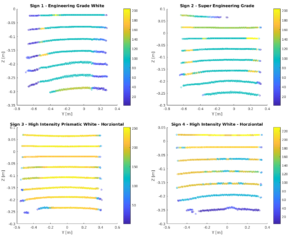
ASTM and the MUTD (Manual on Uniform Traffic Control Devices) have a list of standards for traffic control signs. The signs we are currently testing are Engineering Grade White (ASTM D4956 Type I), Super Engineering Grade White (ASTM D4956 Type II), High Intensity Prismatic White (ASTM D4956 Type IV), and High Intensity White (ASTM D4956 Type III).
From initial testing, we believe we can differentiate between these different signs using LIDAR output.
Stop Sign
[1] ArcGIS – “What is lidar intensity data?“